多関節ロボットには「特異点」と呼ばれる、計算式上でロボットが制御できなくなる姿勢が存在します。
RoboDKは特異点を自動的に検出する機能を備えています。特異点を通るロボットプログラムは作成できない設定となっており、警告メッセージも表示されます。
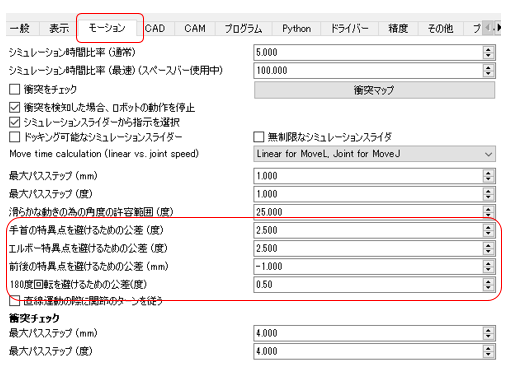
また、オプション設定画面では、特異点や衝突を表示、または防止する許容誤差をカスタマイズできます。(ツール>設定>モーションタブより設定が可能です。)
詳しくは、オンラインドキュメントのこちらのページをご参照ください。
👉https://robodk.com/doc/en/Options-Menu.html