ロボットシステムをセットアップする際、設計段階から周辺機器との干渉を確認しておくことは、とても大切な作業です。周辺機器との予期せぬ衝突を回避し、大切な機材の破損を防ぐだけでなく、設計時の手戻りを最小限に抑え、短納期で効率よく、ロボットシステムを導入することができます。以下に、RoboDKにおける干渉(衝突)チェックの使用方法を説明します。
<衝突チェックの方法>
- ツール>「衝突をチェック」を選択して、衝突検出を有効にします。
※アイコンをクリックし、衝突検出機能の有効・無効を切り替えることも可能です。 →衝突検出機能が無効の状態
→衝突検出機能が無効の状態  →衝突検出機能が有効の状態
→衝突検出機能が有効の状態 - 衝突検出機能が有効な場合、衝突が検出されると、すべてのプログラムとロボットの動きが停止するとともに、衝突したすべてのオブジェクト、ツール、ロボットリンクが赤で強調されます。
<衝突マップについて>
- 衝突マップ上で、セル内におけるオブジェクトの衝突判定の設定が可能です。
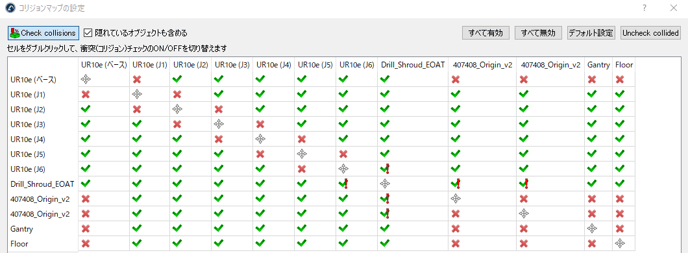
※緑✔は衝突判定が有効、赤×は無効となっていることを意味します。
※【!】がついているものは、対象物同士が衝突(接触)していることを意味します。
※連続するロボットのリンクは、常に接触しているとみなされ、デフォルトで衝突チェックが無効となっています。
※各オブジェクト間の衝突チェックの有効・無効の設定は、ユーザー様にて調整いただけます。