ROBOTIQハンドとロボットの接続方法について回答します。
ROBOTIQのハンドは、接続するロボットによって接続方法が変わります。
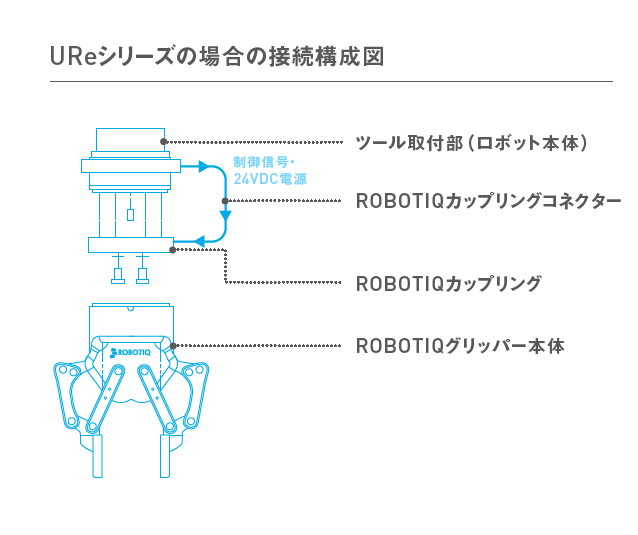
・ユニバーサルロボット(UR)eシリーズの場合
UReシリーズの場合、非常にコンパクトに接続することができます。
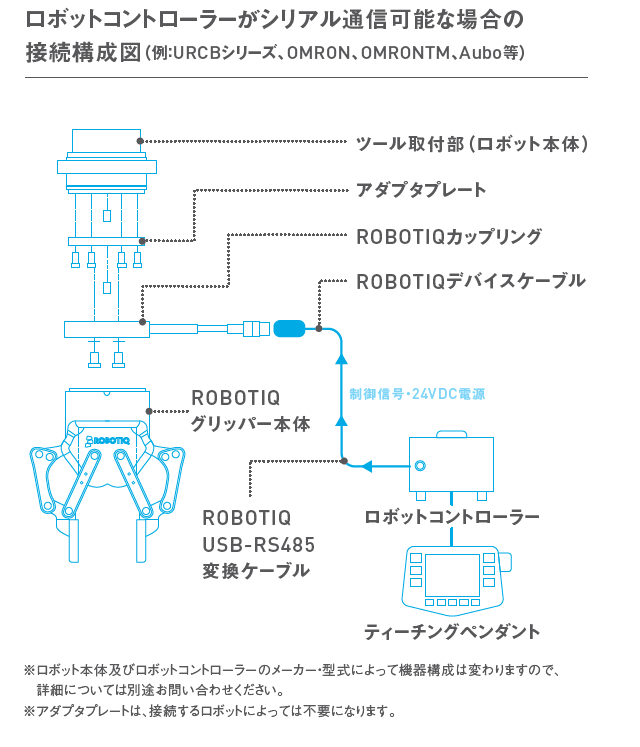
・ロボットコントローラーがシリアル通信可能な場合
(例:URCBシリーズ、テックマン、OMRONTM、Aubo等)
ロボットのコントローラーがシリアル通信可能な場合、
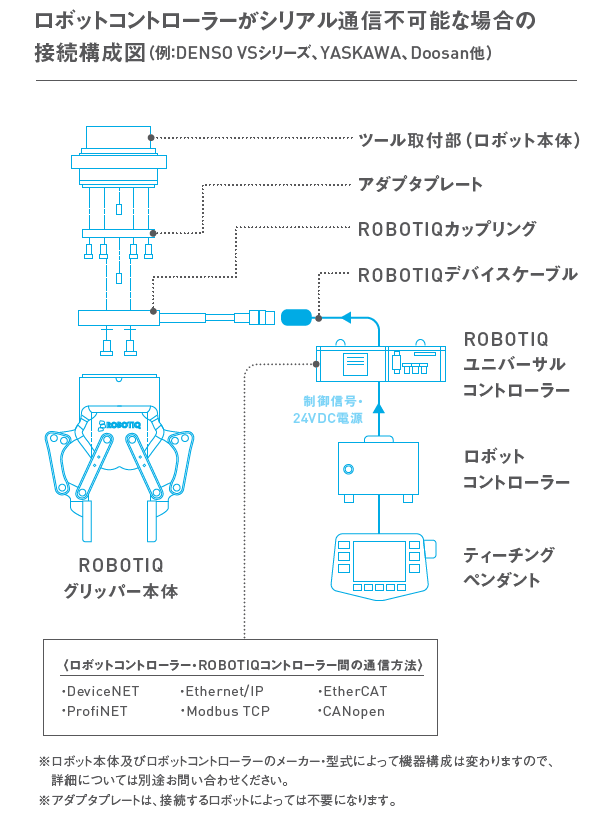
・ロボットコントローラーがシリアル通信不可能な場合
(例:DENSO VSシリーズ、YASKAWA、Doosan等)
ロボットコントローラーがシリアル通信不可能な場合、ハンド-ロボットコントローラー間の通信のためにROBOTIQユニバーサルコントローラーが必要になります。
ロボットコントローラー-ROBOTIQユニバーサルコントローラー
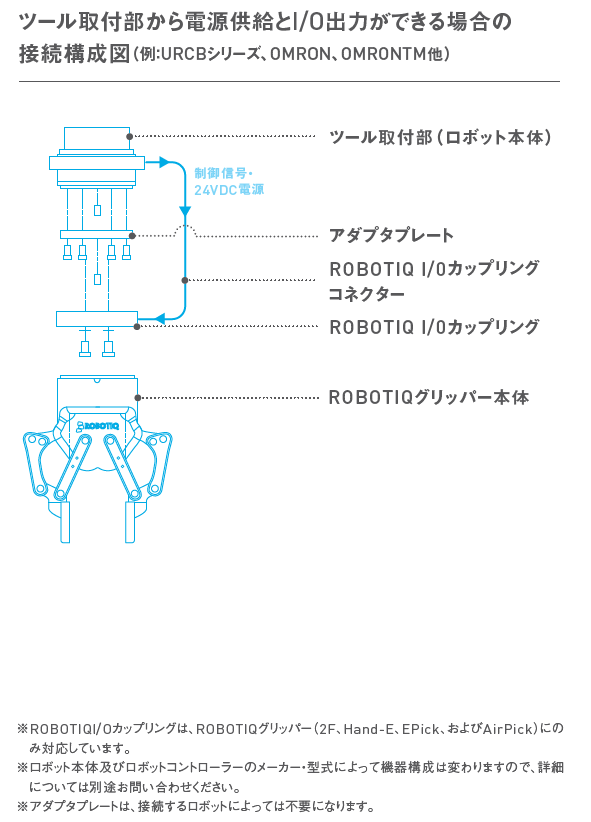
・ロボットのツール取付部から電源供給とI/O出力ができる場合
(例:URCBシリーズ、テックマン、OMRONTM、JAKA等)
この接続方法は、最低限の開閉動作のみしか制御できないため、シンプルな把持動作で構わない場合や、何よりもケーブル類のコンパクトさを求める場合にご検討いただくことがほとんどです。
s