【サイクルタイムを定義するために必要な要素】
RoboDKでは、プログラムのシミュレーション時にサイクルタイムの概算を算出できます。サイクルタイムの精度は、ロボットコントローラ、ロボットの動きの種類(MoveJとMoveL)、丸め値の使用の有無、実際のロボットの速度/加速度の制限など、多くの要因に左右されます。
【サイクルタイムの精度を上げるために】
・ロボットの速度と加速度は、個々のロボットよって大きく異なるため、ロボットパラメータで設定する必要があります。
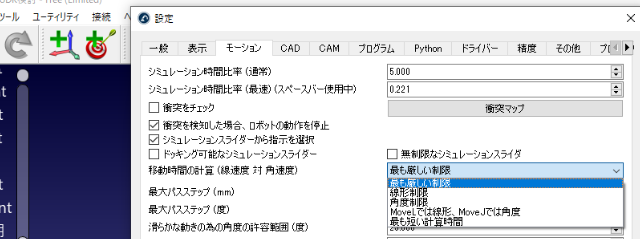
・ツール➔設定➔モーション➔移動時間の計算で進み、「最も厳しい制限」を選択してください。こちらを選択することで、 線形移動を実行するときに最大ジョイント速度がオーバーシュートしないよう、設定されます。※デフォルトでは、「MoveLでは線形、MoveJでは角度」が選択されています。
※サイクルタイムに関するオンラインドキュメントはこちらから👉https://robodk.com/doc/ja/General.html#CycleTime
※シミュレーション速度に関するナレッジページはこちらから👉
https://knowledge.kyodo-robot.com/knowledge/about-robodk-simulationspeed